Industrial robots are renowned for their high repeatability, often achieving well under 100 microns (0.1 mm). Achieving such repeatable precision depends on accurate programming, which can be done using either a teach pendant or offline programming.
With teach pendant programming, the robot is moved manually to each target position, and when performed carefully, this method allows the robot to repeat tasks consistently after being programmed. Performing a reference frame calibration can make teach pendant programming more flexible and easier to adjust when required later. In contrast, offline programming relies on minimal manual execution but requires reference frame calibration as an essential step.
What is Reference Frame Calibration?
In robotics, reference frame calibration is the process of establishing a known and repeatable coordinate system for a robot. It ensures that the robot’s position and orientation in Cartesian space are accurate and consistent relative to a defined coordinate frame.
This process typically requires a calibrated probing tool (also known as a TCP or tool centre point) mounted on the robot, and a set of feature points that define a unique reference frame. For guidance on tool calibration, refer to our previous article on calibrating a robot tool.
Step 1 – Identify Robot Coordinate Frames
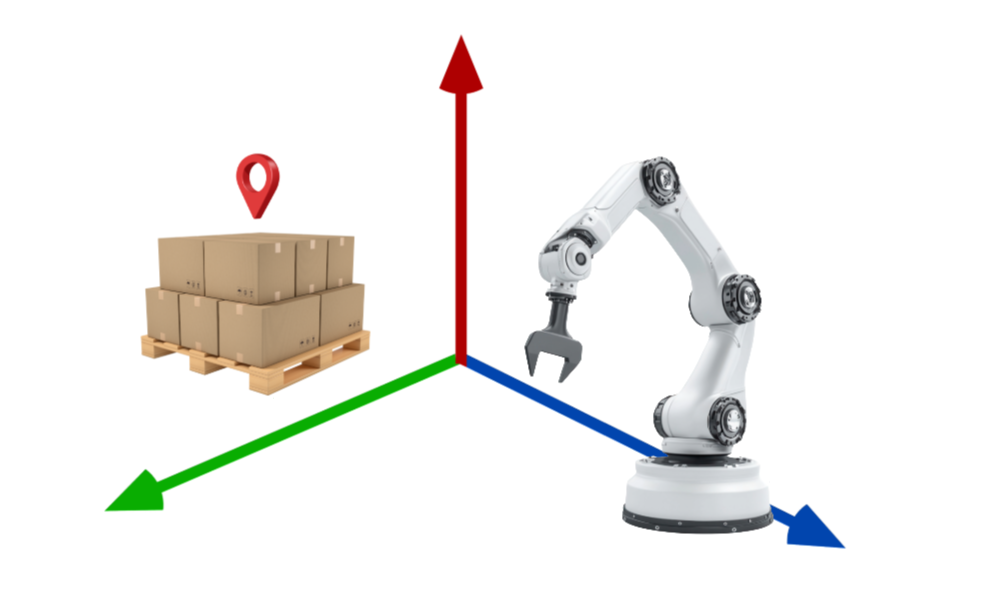
Every robot has a built-in coordinate system used to reference its positions in Cartesian space. This is known as the robot base frame (or root frame), usually located at the base of the robot. From the base, other coordinate systems such as the flange frame and tool frame are defined and located with respect to the base.
A reference coordinate frame, however, is typically located outside the robot’s body: often at or near the workpiece. This external frame is sometimes called the world or user frame. Using an independent reference frame to define robot/target positions offers advantages over relying solely on the robot’s base frame, as explained in Step 2 below.
Just as multiple tool frames can be stored and recalled on a robot controller, the controller can also store several reference frames, making it easier to switch between different work setups.
Step 2 – Choose a Reference Frame
The goal of reference frame calibration is to establish a unique coordinate system located conveniently at or near the workpiece. The position and orientation of this frame are defined relative to the robot base frame. Depending on the application, the reference frame can be either on or off the workpiece.
1. Reference Frame on the Workpiece
If the workpiece has suitable geometric features, the reference frame can be defined directly on it. For example, the two legs of a right angle can define the x- and y-axes of the coordinate system.
- Pros: Simple process with no need to determine the offset between the workpiece and reference frame.
- Cons: Requires calibration for each new workpiece.
2. Reference Frame off the Workpiece
Often, it is more practical to define a reference frame at a fixed and convenient location, such as a jig, table corner, or fixture, and independent of the workpiece.
- Pros: It’s more flexible, especially when parts or fixtures move slightly. Once a reference frame is established, it can be reused for multiple workpieces.
- Cons: The offset between the reference frame and each part must be measured or calculated.
Step 3 – Calibrate the Reference Frame
Once the reference frame location has been chosen, calibration can begin. Using a calibrated probe tool mounted on the robot, move the probe to contact several feature points that define the reference frame.
Common calibration techniques include the 3-Point and 6-Point methods, as specified in most robot manuals. After probing the feature points, the robot controller computes the reference frame’s position and orientation relative to the robot base frame.
Considerations for Offline Programming
While reference frame calibration can enhance manual programming, it is essential for offline programming. Calibration ensures that the virtual setup in offline software aligns accurately with the physical world.
Once a reference frame is calibrated, its data can be stored in the robot controller and imported into offline programming software (such as RoboDK). If necessary, additional offsets can be applied to align workpieces or parts accurately within the virtual environment.
Conclusion
Reference frame calibration is a foundational step in achieving precision, consistency, and flexibility in robotic operations. By defining an accurate coordinate system, we ensure that both teach pendant and offline programming methods produce repeatable and reliable results. The alignment between the digital and real worlds is the cornerstone of reliable offline programming and repeatable robotic performance, stepping up for efficient automation and high-quality production.